ラジコン・ヘリ「クリップ400」
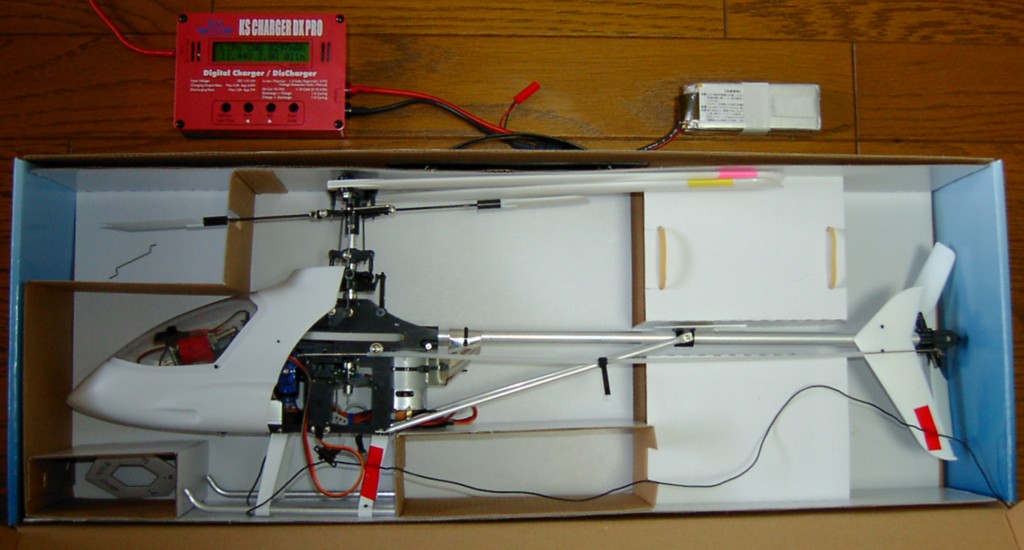
ベルギーのProtech社の製品で、海外ではZoom400という名前で販売されている。
400系モーターを使った3D飛行可能ヘリの先駆者。
Protech社の重点開発がZoom450に移行したため、Zoom400系は進歩が止まっているが、
各社からベルトドライブやCCPMなど色々な派生型(ShogunやZapなど)が作られている。
受信機やサーボが余っていたため、室内で飛ばせるヘリとして購入。
ノーマルモーターでの室内ホバリングの自己記録はLiPo11V2100mAHで連続15分
(バッテリー自体は20分もつ)
現在は純正ブラシレスモーターに換装している。
ノーマルのスチロールローターは安全性が高いのでこだわって使っている。
(スタント時に腰砕けになる傾向はあるけど)
重量:本体450g+バッテリー140g
受信機:JR NER-649S(ケースを外して20gに軽量化している)
ジャイロ:JR G460T(テールロック使用)
バッテリー:リチウムポリマー(LiPo)11V1000/1300/2000/2100mAH
・ノーマルモーター時のパワーソース
モーター:マブチRS380PH(定格7.2V 2.9Aのこのモーターに11V6Aぐらい
流しているから、かなり過酷な使い方である。
とはいえ、限界電圧12Vには収まっている)
ちなみにこれに被せてある鉄リングは磁石の磁力増強用。
ノーマルタイプ(進角無し)の性能:適正電圧7.2V 限界電圧12V
適正負荷 100g.cm
無負荷回転数 16,400rpm
適正負荷時の回転数 14,200rpm 消費電流 2.9A
シャフト系 2.3mm 質量 約70g
アンプ:ユニオン UA-19G(最大連続15A)元々飛行機用なので、超低回転に対応して
おらず、スティックを上げるといきなりローターが回り出すが、信頼性は高い。
(写真ではトランジスタに放熱板を貼り付けているが、必要ないようである)
・ブラシレスモーター時のパワーソース
モーター:純正ブラシレス(インナーローター式)なぜか結構熱くなる。
アンプ:Phenix25
このアンプはBECの電流容量が小さいため、スタント時に4個のサーボを駆動できない。
そこでテールサーボ専用に7.4V700mAHのLiPoを使っている。
現在は消費電流の少ないサーボを選定して使用。
送信機(X3810)の設定
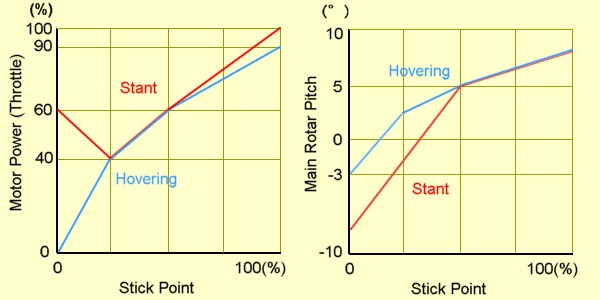 Gyro(JR-G460T) Sense:Hovering 40%, Stant 35%
スタントはアイドルアップ(主にループ用)。ガバナー未使用
機構部
Gyro(JR-G460T) Sense:Hovering 40%, Stant 35%
スタントはアイドルアップ(主にループ用)。ガバナー未使用
機構部
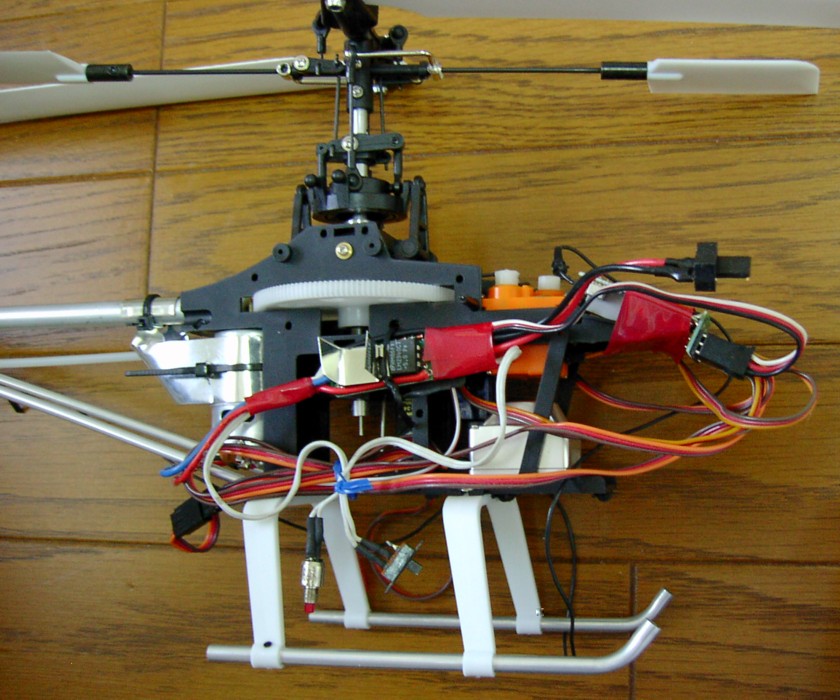 3サーボのCCPMに改造できるように、予めスワッシュにボールが付いている
3サーボのCCPMに改造できるように、予めスワッシュにボールが付いている
2006 CLIP400 Spec & Know-How
AmpはJETI製Advanted Heli 25 Switching BEC。ガバナーモードは立ち上がりが不安定で、
安定するまで気を使う。(室内だと離陸時に天井にぶつかりそうになる時がある。)
SW-BECは2Aあるが、大電流を消費するコアレスサーボだとノイズを出すようだ。
->このアンプは壊れたので、現在はPhenix25をガバナーモードで使用。
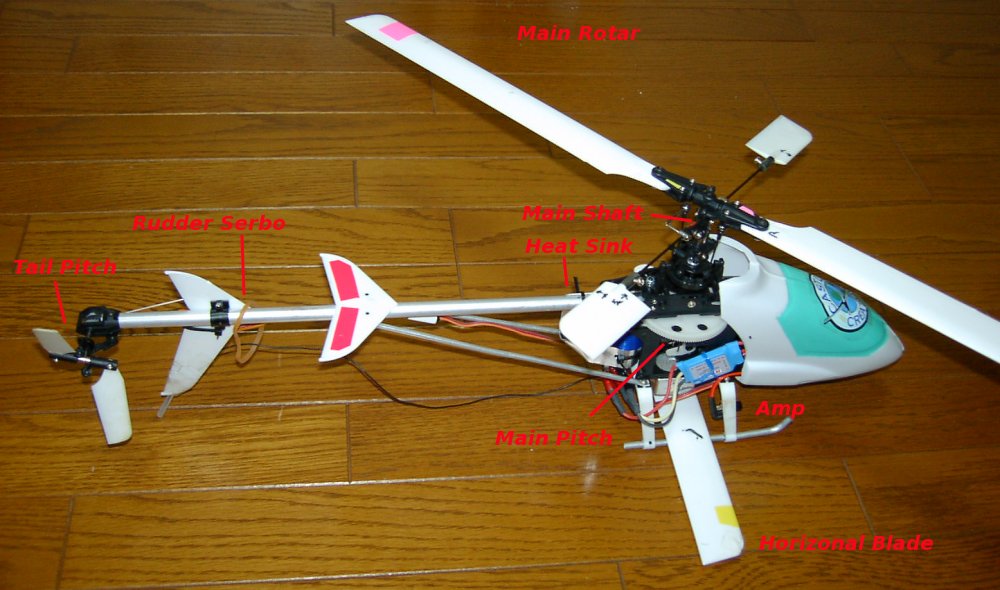
Main Rotarは気楽に飛ばせるソフトプラスチック製のノーマルを専ら使用。
沢山買って(というより、相継ぐ墜落で片割れが沢山残っているため)
相性のよい物を選んでいる。
ちなみにグラスローターは地面に擦っただけでダメになるので長続きしない。
Main Shaftは強化型。ノーマルのMain Rotarなら叩いても曲がらない。
Heat Sinkは1mmアルミ板で自作。テールパイプに熱を逃すため、最後まで熱弛れしない。
Horizonal Bladeはハードランディングの転倒防止(CLIP400のスキッドは狭い)と
上空での姿勢確認のため取り付けている。(まるで初心者みたいだけど)
Rudder Servoはテールに付けたが、サーボが遅いのであまり効果が無い。
(コアレスサーボなら速いのだが)
Main Pitchのベアリングは古い機体だとすぐに抜ける。飛行中に抜けると致命的
(何度も墜落した)なので、長めのネジで挟んでいる。
(エポキシなどの接着剤を使うのも有効かもしれない。)
飛行中にMain Pitchが抜けたときは、空気抵抗のため、Pitch UpするとPitchが
Full-Highになり急上昇する。スロットルを調整してホバリングするとモータ抵抗が
高いので舵(エルロン、エレベーター)が効かない。Pitch DownするとPitchが
Full-Downになり機体は急降下する。要するに、極めて不安定な状態になるので、
すぐに着陸すること。
Tail Pitchもすぐに抜けるが、これは飛行前に嵌め直している。
ホバリング時に抜けても機体がぐるぐる回るだけなので大丈夫。
(ハンチングがおきるだけで、そのまま飛行可能の場合もある。)
上空で抜けると、水平ならオートロピルエット?で帰還できるが、
水平でない場合は落とすしかない;;;
->接着剤G17を使ってベアリングと接着すると大丈夫。
室内ホバリングの動画[20MB]
海外のCLIP400のオプションパーツ 付けたら別のマシンになる?
前のページへ (up)